
Binary Segmentation
The binary segmentation benchmark takes an input images of 1276x717 and then rates models based on average precision. It allows the use of external data, gray or color inputs, any runtime, and any method. We may create additional benchmarks, splits, and rankings based on different metrics, such as runtime, if we get enough submissions.
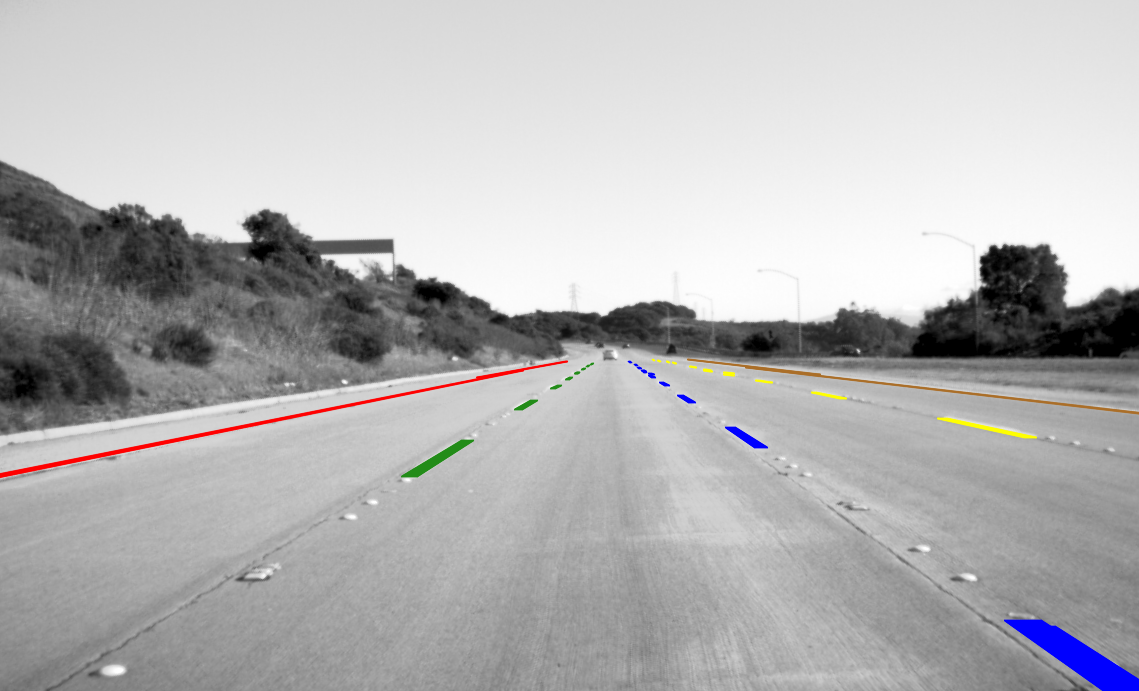
Lane Based Segmentation
In addition to the lane marker segmentation, the individual pixels are assigned a lane relative to the vehicle's current position, e.g. same lane, left. Train models end-to-end, classify by region or density, etc. There are lots of possible methods- for use in automated vehicles, they have to run in real-time.
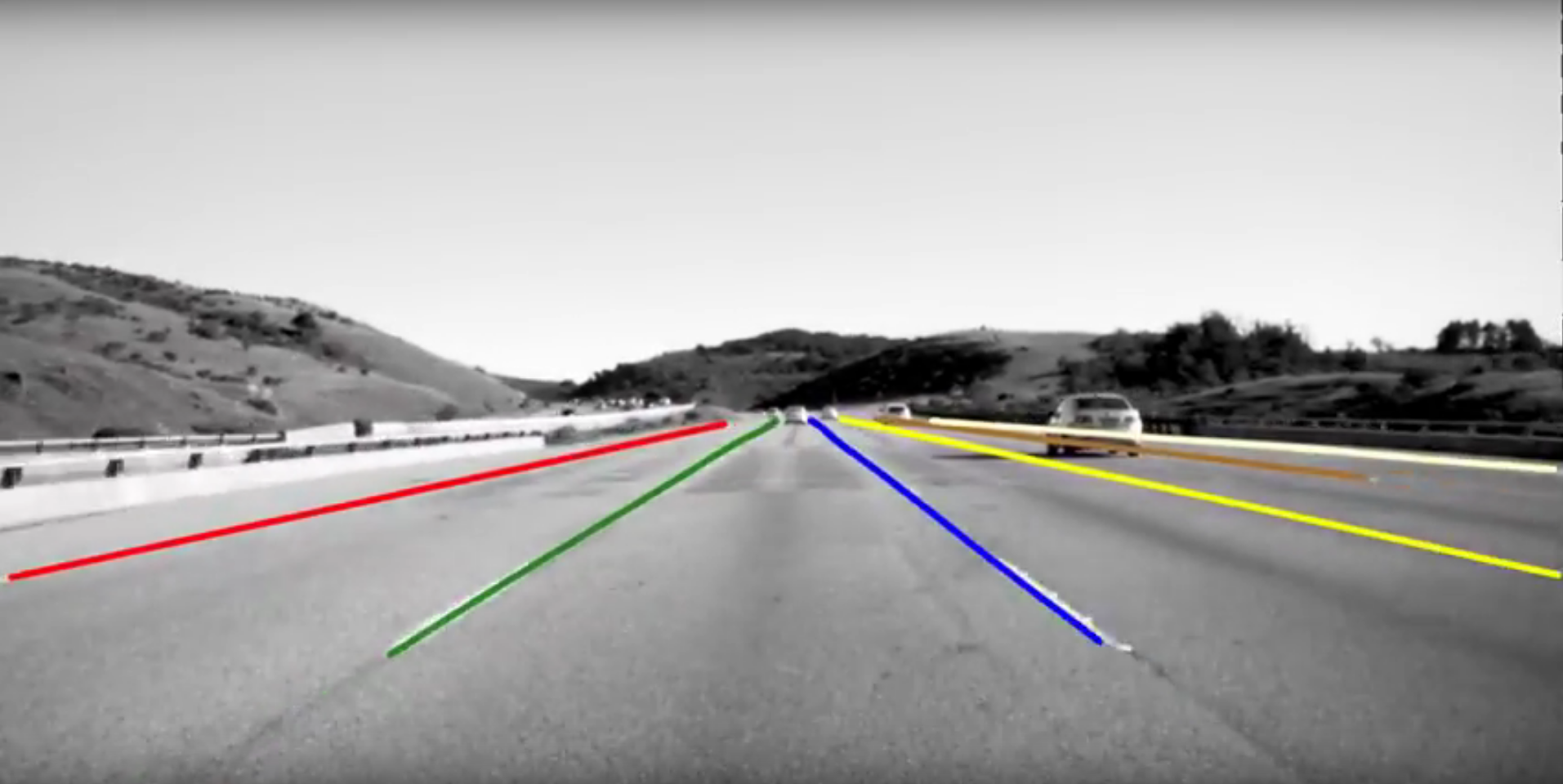
Lane Approximations
Instead of classifying individual pixels, the goal in this benchmark is to approximate the individual lane edges as curves. This can be done using a point for each row, polylines, polynomials, clothoids, or splines. Those curves can be calculated using end-to-end models, curve fitting on the segmentation, density clustering, line following, walker based approaches, line fitting, and many more.